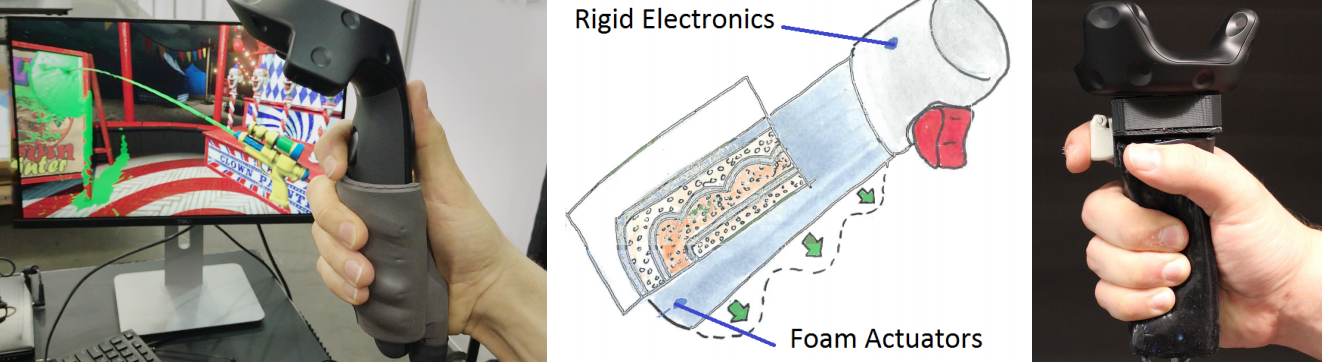
We provide two key demonstrations to highlight the use of fluidic elastomer actuators to provide haptic feedback. These demos allow users to progress through a series of brief experiences where the hand-held controller adjusts its form and behavior to match that of the virtual object used in each demo. The objects held in the demo include a goo gun, pistol and mallet.